"Lane Change Strategy for Autonomous Vehicle"에 대해서 리뷰를 시작하겠다.
논문 리뷰에 사용된 그림은 논문에서 가져왔다.
저자 : Shiyu Xing, Mark Jakiela
Abstract :
Recently, people's demand for smart vehicles continues to improve. As the core of smart driving, driverless vehicle becomes the most concerned technology. Lane change, the most common behavior in driverless situation, greatly affect the road efficiency. Fast and safe lane change operations have very practical significance in reducing traffic accidents. This paper uses driverless vehicle as research object, and the pathing planning and pathing tracking for lane change situation are studied. An efficient path planning method and trajectory tracking controller are designed and simulated. The main content contains the three following aspects:
(1) A set of comprehensive lane change strategy is designed for different working conditions. Then path planning for lane change is researched based on mass point model and an efficient path planning method based on polynomial is proposed and optimized.
(2) Kinematic model and 3 DOFs dynamic model of driverless vehicle based on magic tire model are established using SIMULINK. Several simulation and test are done to verify the rationality of the model.
(3) The trajectory tracking control system based on PID controller is designed. Then run simulation based on the model established and according to the results, the trajectory tracking control system can track the lane changing path accurately and analysis is made.
lane change는 아주 평범한 상황인데, 사고율을 줄이는데 도움이 된다 등등... lane change의 필요성 제기.
(1) ~ (3)은 중점적으로 이번 논문 리뷰에서 다룰 내용이다. 차선 변경 등 차량의 행동 결정을 위한 Decision Making, Trajectory 궤적 생성 방법 등을 앞으로 설명할 것이다.
Chapter 2 Lane Change Strategy Design and Path Planning
장애물 회피 방법 중 하나인, lane change는 인지된 정보를 통해 speed(종방향), steering(횡방향)을 제어하는 것과 관련되어 있다.
2장에서 다룰 내용은 다음과 같다.
(1) 자율주행 차량이 follow, stop, lane change할 지를 결정하는 것에 대해
(2) 어떻게 lane change trajectory를 생성하는지
(3) lane change의 조건 등등
2.1 Lane change strategy design
lane change는 2가지로 분류할 수 있다.
(1) Mandatory : 어쩔 수 없이 차선을 변경해야만 하는 상황(ex. 도로가 합쳐지는 상황) -> 이 논문에서 관심X

(2) Discretionary : 주행상황 등에 따라 차선변경할수도, 안할수도 있는 상황 -> 이 논문에서 관심O
차량이 주행 중 결정할 수 있는 상황
(1) Stop
(2) Follow
(3) Lane change -> 조건 : 목표차선에 충분한 공간과, 앞차와의 거리가 충분할 때 가능.

Fig 2.2에 대한 설명
Fig 2.2에는 Decision making에 대한 기준이 쓰여있다.
Stop, Lane change, Follow할 지에 대해서 잘 쓰여있음.
2.2 Lane change path planning
(1) Sine lane change : 초기 횡방향 가속도가 0이 아님 -> 승차감이 안좋아짐
(2) Arc trajectory ~ : 횡방향 가속도가 계단식으로 변화 -> 횡방향 제어가 어려워짐
(1), (2)의 단점을 극복하고자, (3) Polynomial trajectory 사용 -> 변위, 속도, 가속도 함수가 smooth.
2.2.1 Path planning method based on polynomial function

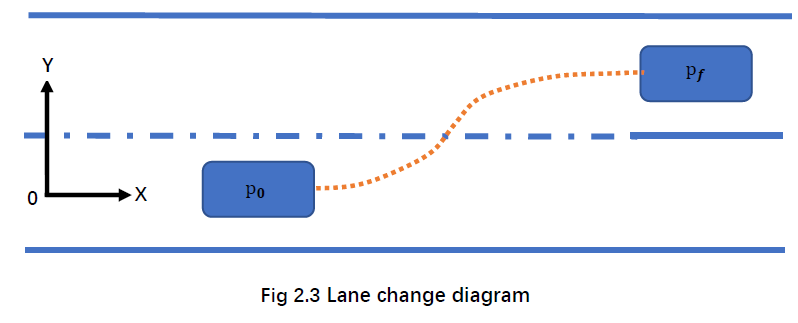
P0 ~ Pf동안 lane change를 수행한다.
종방향, 횡방향 변위, 속도, 가속도 총 6개를 활용하여 차량이 경로를 잘 따라갈 수 있도록.
여기선 5차 polynomial을 사용한다.

lane change할때 종방향 속도는 일정 -> 종방향 속도는(local에서의 차량속도)
횡방향 속도는 변함 -> 횡방향 속도는(steering wheel의 속도)
Fig 2.4 참조


위의 그림은 이해를 돕기 위해서 필자가 그린 그림이다.
2.2.2 Constraints analysis and optimization

시간 0 ~ tc동안 이동한 종방향 거리 : L
A의 속도 : V
속도와 거리를 알면, tc(Time To Collision, TTC)를 알 수 있다.)
tc = L/V (이때 V는 상대속도)
횡방향 가속도와 차량안전성 및 조작성은 반비례관계이다.
이 논문에선 -2m/s2 <= a_lateral <= 2m/s2로 제한함.
종방향 거리와 횡방향 가속도는 반비례관계이다. -> Fig 2.7 참고


이를 정리하면 위의 그림과 같은 관계가 나온다.

필자는 Table 2.1을 유심히 봤다. 유용한 정보로 보인다.
이 부분까지 필자는 읽어봤고, 리뷰를 마치도록 하겠다.



